mark ericson
about
U
about
I am a computational designer and educator. This site contains a selection of work that encapsulates my research and teaching in robotic design, drawing and tool making. Much of my research is centered in translating historic techniques of design and fabrication into contemporary digital technologies. I have researched 17th century stone cutting and translated the techniques into a python program that generated a series of animated drawings. This work was later published in a book entitled Animating Guarini. I have worked with students to translate the design of classical columns, centrally planned churches into tool paths for robotically milled and 3D printed objects. In all cases, the focus is on the research and development of case specific tools that aid in the production of novel and imaginative design solutions. I hold a Master's of Architecture from SCI_Arc.
ericson.mark.c@gmail.com
site index
Orders, Second Year Undergraduate Studio, Woodbury University
Single Line Drawings, Robotic Design Lab, Woodbury University
Surfaces of Revolution, Robotic Design Lab, Woodbury University tool making
Architecture, Lossy, Capstone Studio, Woodbury University
Architecture, Plugins for Architecture, Capstone Studio, Woodbury University
Animating Guarini
Drawing with Cones in Two Dimensions


Architecture, Orders
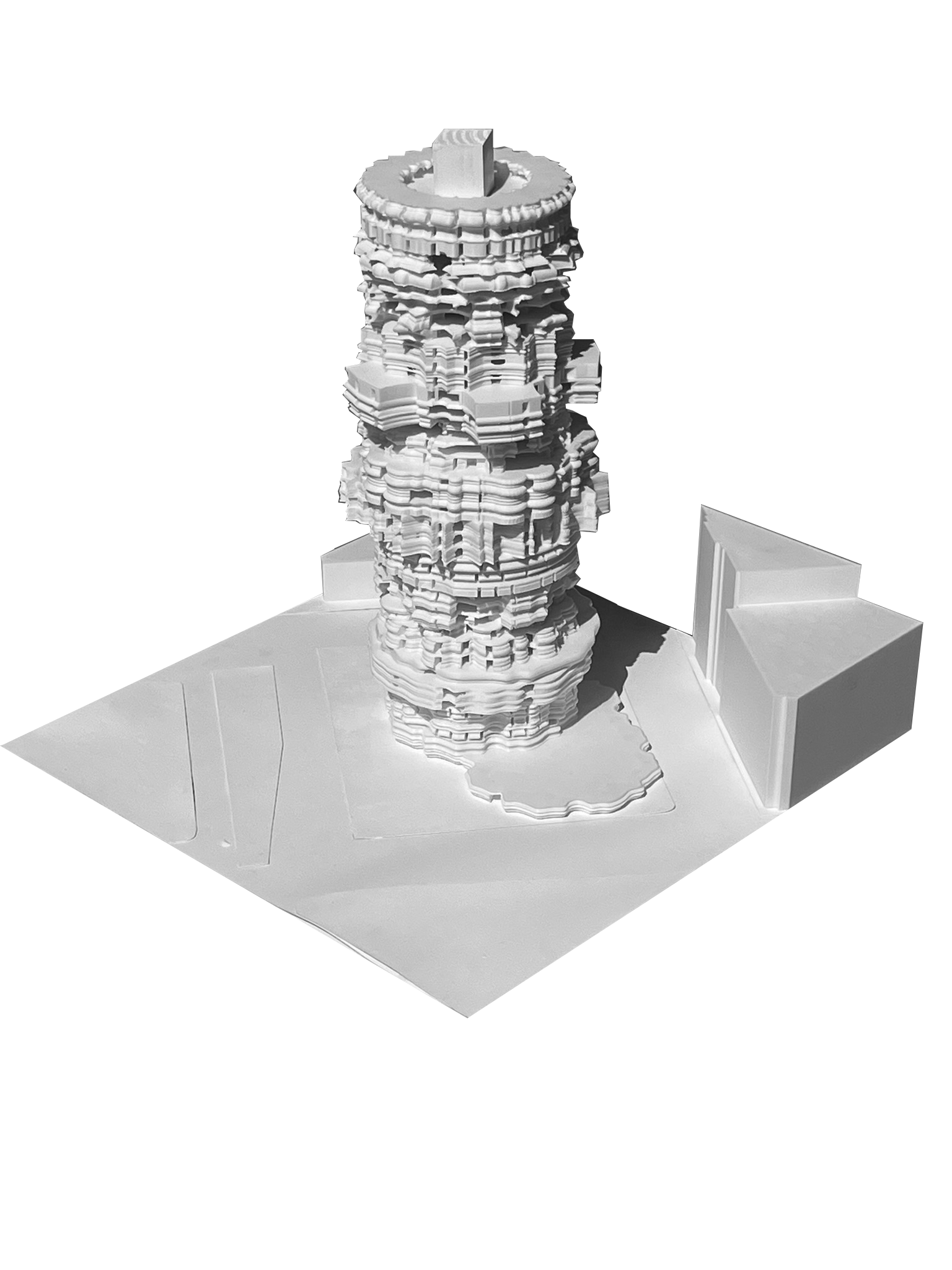
In this second year undergraduate studio, sudents studied columns and their ordering systems as a means of developing a set of shared tools and collaborative methods across the studio. The studio began with a detailed precedent analysis of the column and moved onto the reimagining of its rules and systems to produce new Orders of columns and eventually building proposals derived from this initial research. All work from the studio was completed in Grasshopper for Rhino 7. Students used this software to develop digital models, produce drawings and tool paths for our Kuka PRC robot. Each student produced a set of 120 tool paths using Grasshopper and KUKA PRC. These tool paths were then used to mill an object from semi-dry blocks of porcelain with a 1/2 inch end mill. The limited number of tool paths and the size of the cutting bit enabled each of the 54 students in the class to robotically mill an object in under 15 minutes , ensuring access to the entire study. At the core of the studio was an idea of making advanced computational tools available to students early in their educations. The hope is that this early introduction will allow them to imaginatively work with new tools and technologies throughout their five year educations.

Architecture and Media Arts, Single Line Drawings
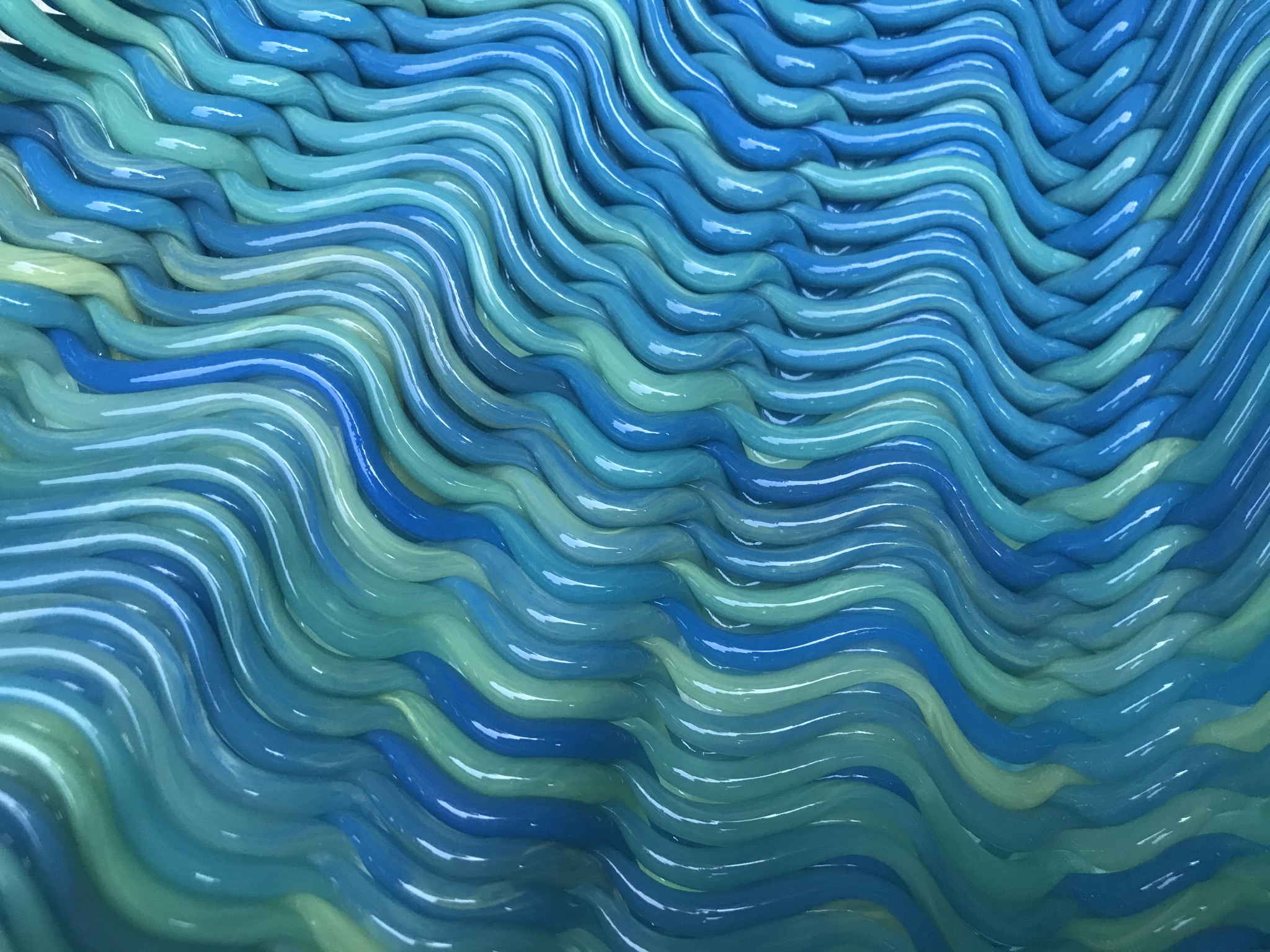
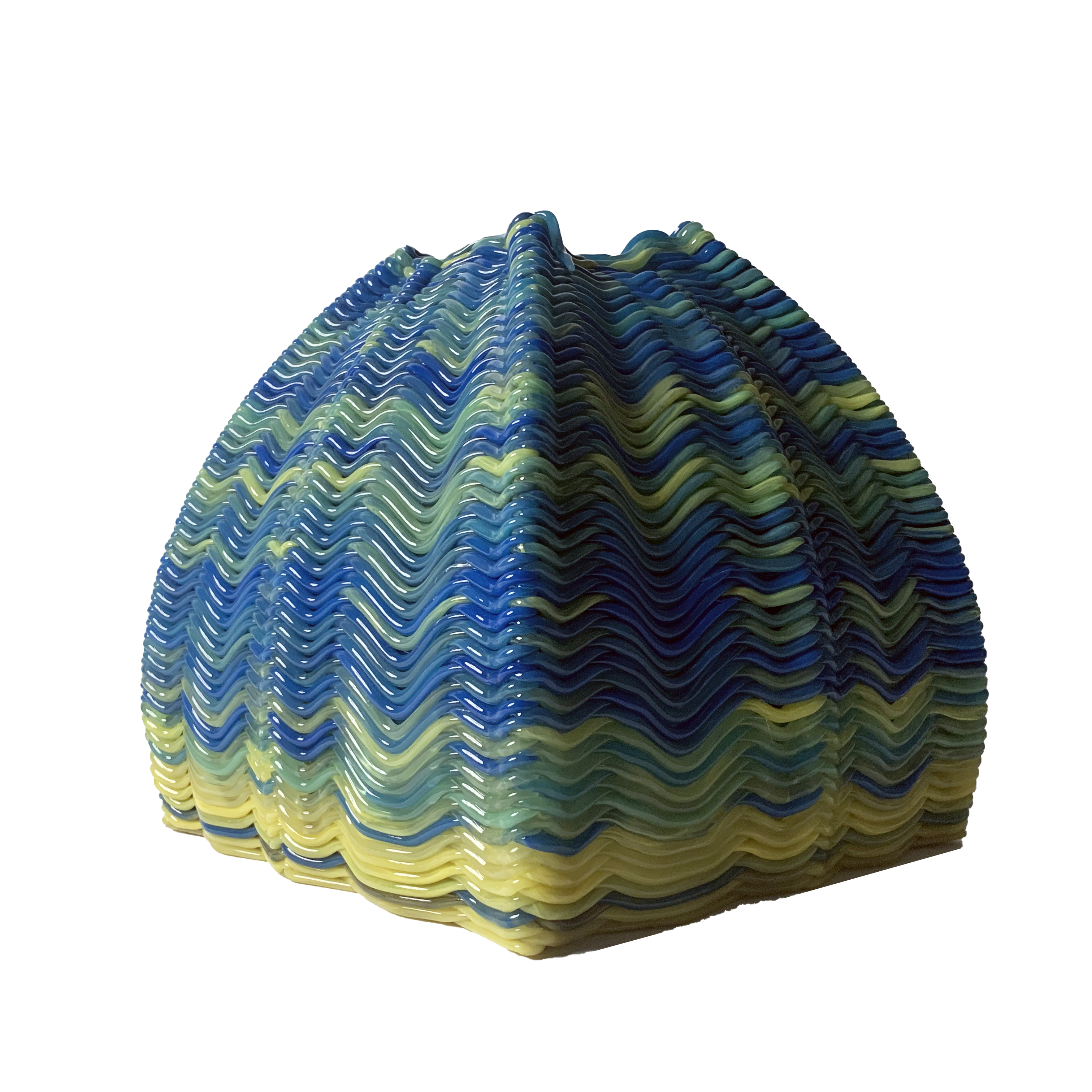
Perhaps one of the most “magical” aspect of robotic fabrication is movement. Robotic arms move along limited spherical paths defined by their joints. The path of the tool at the end of the robot corresponds (at moments) to the shape of the object being fabricated. In contrast, the other joints of the robot move and respond to accommodate the motion of the tool, moving in sometimes surprising and unexpected ways. Some of these motions seem almost human. Consider the (human) motion of swinging a hammer. The person swinging the hammer focuses on the point of impact, the head of a nail. However, a whole series of joints respond to this motion: shoulder, fingers, elbow, and wrist. Similarly, as designers, we focus on the object to be fabricated by the robot, and perhaps less on the sets of movements that define the motion. In this class we shifted our focus from designing objects to designing paths of motion. In lieu of developing boundary representations and using standard software tools to cut them into to toolpaths, this seminar generated the the tool paths themselves. We “drew” objects in three-dimensions from a list of points generated from the equation of the unit sphere. This list of points was then translated in list of lines that became a continuous tool path for the robot. This path was then printed as the three-dimensional drawing/object from poly-lactic acid.