
Architecture and Media Arts, Single Line Drawings
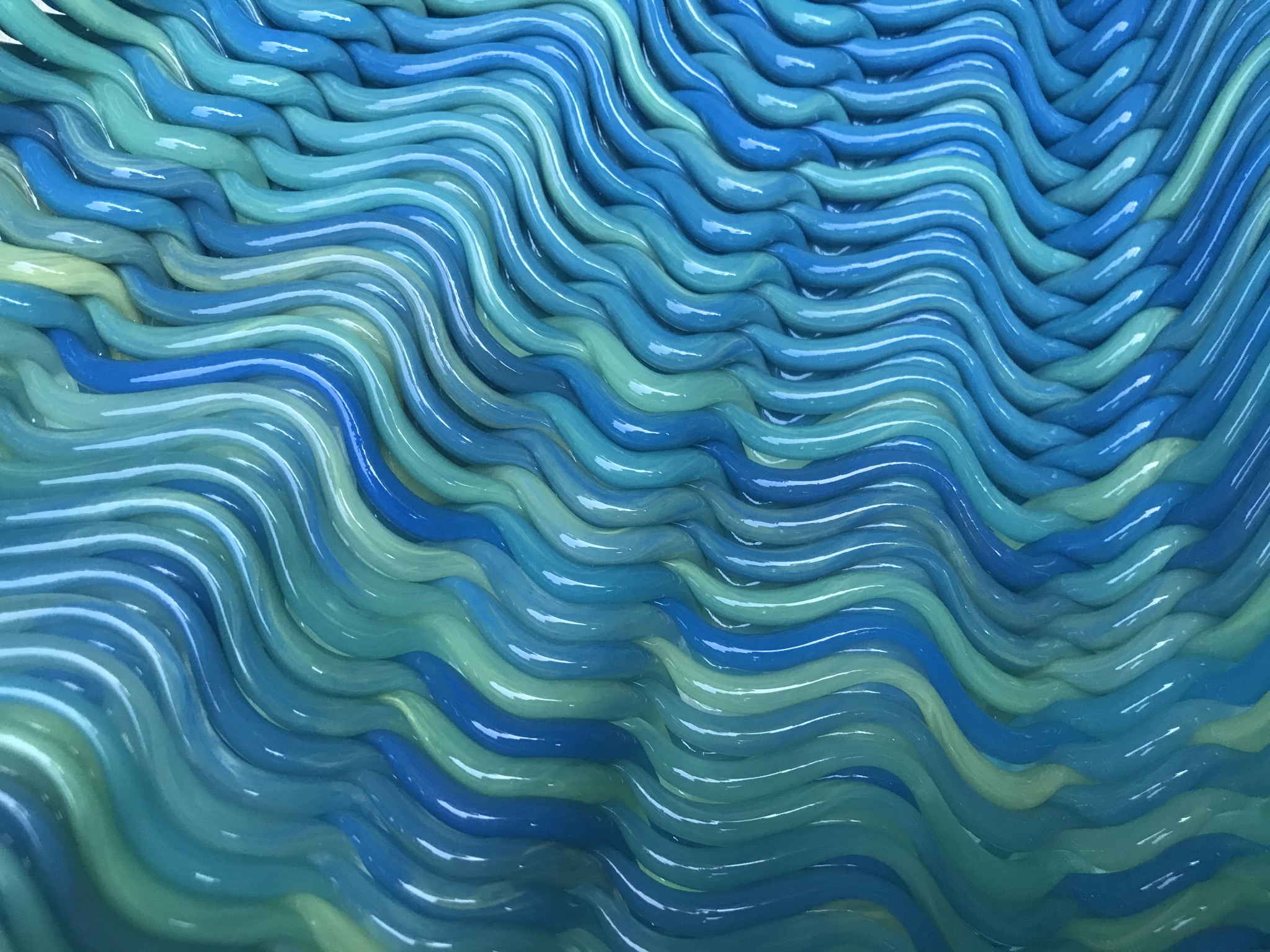
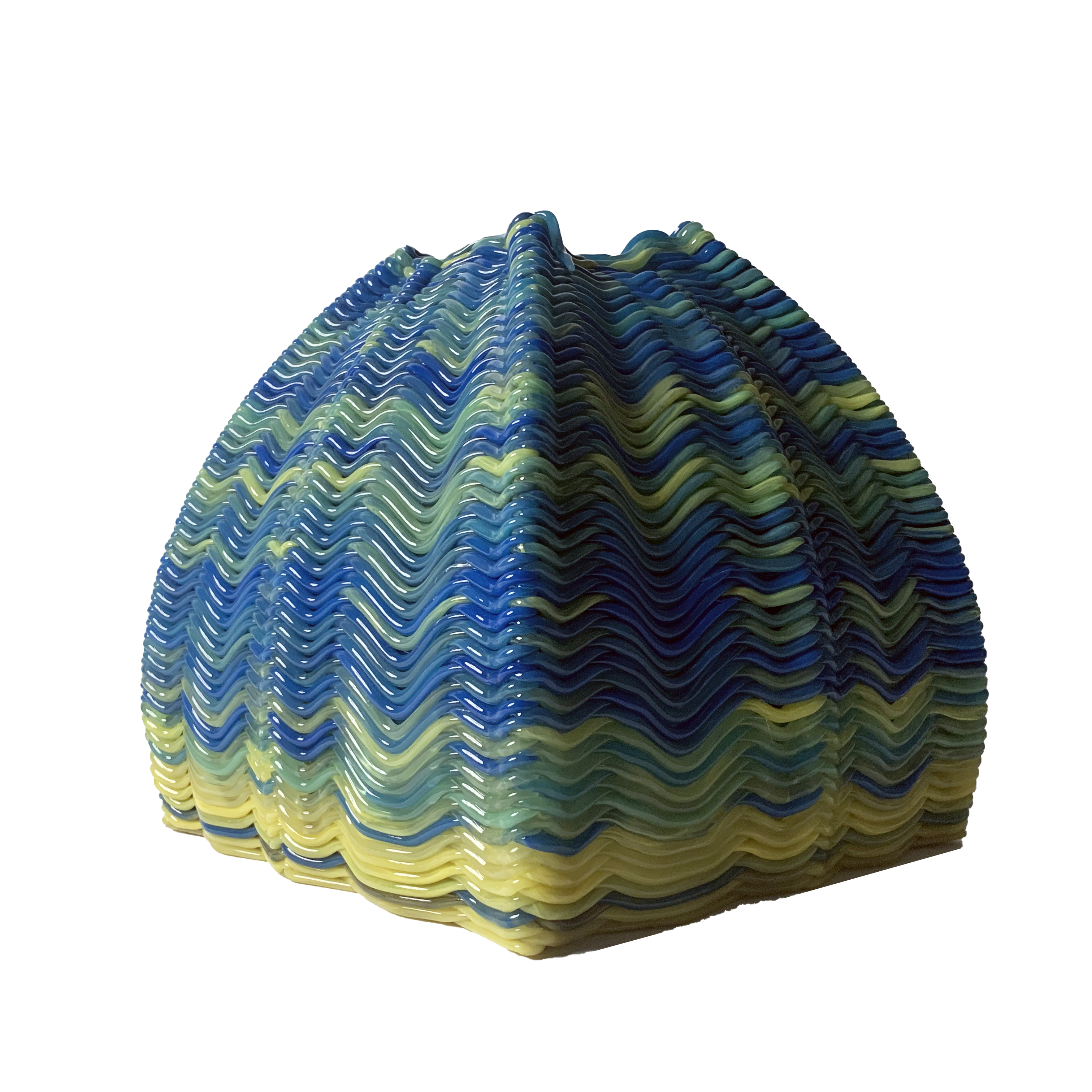
Perhaps one of the most “magical” aspect of robotic fabrication is movement. Robotic arms move along limited spherical paths defined by their joints. The path of the tool at the end of the robot corresponds (at moments) to the shape of the object being fabricated. In contrast, the other joints of the robot move and respond to accommodate the motion of the tool, moving in sometimes surprising and unexpected ways. Some of these motions seem almost human. Consider the (human) motion of swinging a hammer. The person swinging the hammer focuses on the point of impact, the head of a nail. However, a whole series of joints respond to this motion: shoulder, fingers, elbow, and wrist. Similarly, as designers, we focus on the object to be fabricated by the robot, and perhaps less on the sets of movements that define the motion. In this class we shifted our focus from designing objects to designing paths of motion. In lieu of developing boundary representations and using standard software tools to cut them into to toolpaths, this seminar generated the the tool paths themselves. We “drew” objects in three-dimensions from a list of points generated from the equation of the unit sphere. This list of points was then translated in list of lines that became a continuous tool path for the robot. This path was then printed as the three-dimensional drawing/object from poly-lactic acid.